How Long ’til Black Future Month? by Jemisin, N.K.
As a big fan of N.K. Jemisin I just wanted to read more of what she’d written. This is good for that; it’s a really nice dip-in to the worlds she has created and leaves you wanting more!
We are all familiar with the standard kanban/agile board settings:
There are many variants on these names, but they’ve remained pretty standard over all the organisations I’ve worked in.
I myself now prefer a buddhist-inspired variant; namely:
backlog): Items floating in the expanse of consciousness.todo): Items present in the mind.in progress): Items presently being enjoyed directly.done): Items that have passed their time with us, for now.blocked): Items temporarily on hold.It at least lets me feel more relaxed about almost every column :)
]]>I can’t remember when I first stumbled across SciRate.
I’d had a fascination with scientific papers for many years, well before actually attending university (as a mature-age student) and starting to learn more formally. I would store them in a variety of ways, print them out and hang them up in my house; send them to myself on a mailing list that I created just for that purpose, or a public subreddit where I would post the papers I wanted to read, so I wouldn’t forget about them. Evidently, the “bookmarking” feature in the browser wasn’t one I found particularly useful.
Eventually, I discovered JabRef, which I used for several years. I stored all the papers that I was interested in (at the time, quantum computing), and learned all about bibliography management. I even stored all the PDFs, and the metadata from the JabRef system, in git, horribly offending bitbuckets storage limits by having a repository ~10GB in size (I think it doesn’t clone successfully anymore; it’s been several years since I tried.)
After some time I became tired with JabRef, and built my own (very very terrible) reference management program: super-reference.
Eventually, I discovered SciRate. I think the version I found was called “SciRate 2”. It was in the hands of Bill Rosgen. I got incredibly excited and signed up immediately. Because the code was open-source (I actually can’t remember, but I think it might’ve been a personally-hosted git repository somewhere), I added possibly one of my first “impactful” changes: MathJax support! This was neat; now we could see rendered math while reading abstracts and titles! I think arXiv.org only added this feature a few years ago.
But, aside from this very minor hacking on the code, I immediately started finding SciRate actually useful! I could browse it every day; see which papers would pop up, and track papers I was interested in. Fairly quickly, it became a very addictive habit for me. I began to learn the time of day that it would update, and made sure I would scour the website shortly after to browse the “freshest” papers.
I did this for several years (actually, I only stopped recently, maybe a few months ago). I read many papers (but not every one that I would “scite”); made several nice connections, and even used my personal SciRate data to teach my first deep learning workshops. SciRate stuck with me as my interests varied from quantum computing, theoretical physics, black holes, philosophy, AI, deep learning, computer vision, generative art, category theory, astrophysics, and the stranger maths papers. For a while my favourite thing was discovering the “best paper title” of the week.
The most memorable moment was when, many years later (after the scirate3 re-write), I met people who “knew” me from SciRate, only because they had seen that I would “scite” a lot of papers (in fact, someone told me that they didn’t think I was a real person; only a scite-making bot.) To date, I’ve amassed more than one hundred thousand “scites”. And yes, most of this was done by clicking manually; but in the last year or two I’ve used a custom program I wrote: the scirate-cli.
In any case, by a very strange coincidence, during my Masters program I happened to learn that SciRate was undergoing a re-write, amazingly by a company based in Melbourne (where I lived); just down the road from my university! I happened to have a conversation with the founder of that company, Ben Toner, relating to my masters project, but it was a curious connection.
That re-write ended up going, in my view, quite well. But I think, at some point, it stopped being funded, and fell on the shoulders of mispy. Mispy funded SciRate for a while, out of their own pocket, until I decided to take it over from them.
That was, now, 5 years ago.
All I’ve really been doing in the mean time is keeping things afloat. Upgrading the various packages as is required; managing the server, and the occasional bugfixes.
The only interesting thing I did, in recent times, was to add a “jobs” feature to SciRate. This was actually moderately successful, but in the end it was more effort for me to maintain than it was worth, so I disabled it.
SciRate needs a new maintainer. I’ve decided that, personally, my focus has to shift elsewhere. You can read about that in the Addendum below.
Here’s what you’ll need to do:
The last one is actually quite important! SciRate has lacked any real new features for a very long time; but there’s certainly some interesting things that could be done! Notable among them could be:
The world is (somewhat) your oyster. Clearly there are some rules on how we’d like SciRate to develop; after all, there is a solid and growing user base, who have some expectation on how it will operate.
In any case, if you’re interested in getting involved, reach out to Aram and myself by sending us an email:
We’d love to hear from you.
The central reason I’ve decided to stop spending time on SciRate is because of the climate emergency. I’ve been reading a lot of books and it’s become increasingly important to me to spend my energy learning more and doing more (or less!) in this space. If you’re interested in this too, then please reach out; I’d love to chat!
]]>You were born, cried, learned, made friends, and talked to no-one.
You have survived off the land; launched a startup (the best one), managed thousands of people, and never been able to get a job, no matter what your resume says or how you change your name.
You have travelled; and you have lived alone, isolated, and cold.
You have been the best and succeeded all your life.
You have failed; only, just missed out, and never tried again.
You made people happy; shown them the best time, given them everything, and hurt them, taken it all for yourself, and killed them.
You have died after every breath, and before your first.
You have already accomplished everything.
What do you want to do next?
]]>
What is time? How do we measure a life? How many things did you get done today? What are you working on tomorrow!? Can you come hang out on Sunday!!?
Recently, and also always, I’ve been thinking about how to manage a list of todos. During an internal knowledge-sharing session at work I was prompted to reflect on all the different schemes I’ve tried:
Right now I’m back to a whiteboard (by luck I happen to have one behind me where I work), and ‘todo’ notes in code + github issues.
My friend Ruth told me something that perhaps is very obvious but was also surprisingly calming to me: You’ll die with items on your todo list. So don’t worry about it!
I think there’s a few ways to think about this:
I want to live around option (3) and (1) at the moment, but of course option (2) is a very very strong driving force; and often necessary (for example, at work!); the only time I was brave enough to enact option (3) at a work setting was when I ran my own business!
Another interesting thing that came up as part of the work discussion was that in some ways what you want to do depends on your mood. No doubt! So … maybe mood can be a parameter?!
I think, secretly, for the rest of my life, I will believe that there is a True answer out there; an ultimate organisation scheme; the Four-Fold path to Life Efficiency: Right Editing, Right Organisation, Right Workflow and Right History.
But I also think that I should never think about this again. But on the other hand, I was inspired at the talk today; so I might give task-warrior another go.
But, you didn’t come here for that! Maybe you came here for advice? So, here it is (it’s not even my advice! Gala claims it’s her idea which is probably true):
If you can, don’t even write the thing down; just do it immediately, or, alternatively, convince yourself you don’t need to think about it now.
Maybe it’s part of my personality, but this works surprisingly well for me. Especially if it’s something that I’m working on with someone else; instead of delaying my part, I can just try and make as much progress as I can immediately, and send it back to the other person! Another way of saying this: I can offset storing my todo list to you!
I find this idea to be quite operaitonal; I often find myself using this rule to do something sooner rather than later.
Here’s one thing I know about myself: I can’t be trusted with lists. I get a bit obsessed with organising them. So I’m trying to avoid them these days.
]]>Continuing the tradition started in 2018, continued in 2019 over on the Braneshop blog, I was reminded I haven’t posted the books I read in 2020 yet.
So, here we are:
How Long ’til Black Future Month? by Jemisin, N.K.
As a big fan of N.K. Jemisin I just wanted to read more of what she’d written. This is good for that; it’s a really nice dip-in to the worlds she has created and leaves you wanting more!

Gravity’s Century: From Einstein’s Eclipse to Images of Black Holes by Cowen, Ron
Pretty good. This was a nice history of black holes and an introduction to some of the pressing issues presently.
The Cloudspotter’s Guide by Pretor-Pinney, Gavin
I picked this up after starting (but not finishing) The Wavewatcher’s Companion, which I found to be hilarious. This book was not as funny, but was still pretty good. Gavin has a very nice way of appreciating the world.
Altruism: The Power of Compassion to Change Yourself and the World by Ricard, Matthieu
I really quite enjoyed this book, and infact wrote a longer review over on the Between Books website.
Girl, Woman, Other by Evaristo, Bernardine
A nice collection of stories featuring different women and how their lives intersect. I think it’s quite nice to get so many stories from the everyday lives of women; especially for me, for whom it’s a bit unknown territory.
The White Album by Didion, Joan
The first Joan Didion book I’ve read. She’s very famous of course; and I don’t know. It was good to read; but was it objectionably good? Maybe. It’s at least nice to know a bit about her life and how she writes. I’ll probably read more.
Mullumbimby by Lucashenko, Melissa
I quite enjoyed this story. It’s also the first time I’ve read a modern fictional Australian indigenous-centered story. Will be on the look out for more books of this kind! Came up as part of the OC House bookclub, I think.
Down Girl: The Logic of Misogyny by Manne, Kate
This book is amazing. I found it to be written in a bit of an academic-y style; so it can be a bit dense, but it does an amazing job of framing what misogyny is and how it is present in all aspects of society.
Unfree Speech: The Threat to Global Democracy and Why We Must Act, Now by Wong, Joshua
This is a nice short history of free speech and how China is taking over Hong Kong. It was interesting to read about how they attempted to make some large changes to their democracy through grass-roots organisation. In some ways quite inspiring, but also a reality check that it isn’t easy to defeat power. Worth a read.
A Month in Siena by Matar, Hisham
This was just a nice simple book about someone getting amongst life in a new town. In many ways I think this kind of experience is how many people wish their holidays to go: meeting some nice stranger, integrating into the community, and just appreciating the joy of life.
The Weil Conjectures: On Math and the Pursuit of the Unknown by Olsson, Karen
I can’t remember much about this book at this point; I think I enjoyed it.
The Worst Journey in the World by Cherry-Garrard, Apsley
I read the next two books back-to-back. This one was strange. It’s written from the English perspective; it’s quite racist at times. I wouldn’t recommend reading it, unless you really want to compare perspectives on the journeys of Scott and Amundsen.
The Last Place on Earth: Scott and Amundsen’s Race to the South Pole by Huntford, Roland
This was a really interesting read. It was so fascinating to compare how Amundsen approached the journey compared to Scott. According to this book, Scott was woefully underprepared and arrogant, and Amundsen spent many many years training and learning the right skills from different indigenous groups in order to survive.
If you want to learn about the race to the south pole; this book is definitely better than the above.
Food Rules: An Eater’s Manual by Pollan, Michael
More of a blog post than a book; but still, nice to keep next to you somewhere when you want to remember if it’s okay to eat chocolate everyday (probably not) or have a wine with dinner (probably fine).

Men Explain Things to Me by Solnit, Rebecca
Hilarious. This is a collection of stories; some funnier than others, but overall great.

The Shadow of the Sun by Kapuściński, Ryszard
I enjoyed this as a nice way to get a bit of, albeit an outsiders, insight into how different people live in some of the poorer parts of Africa.
Capital and Ideology by Piketty, Thomas
I really enjoyed this book, and wrote about it more over on Between Books - Capital and Ideology
Capital in the Twenty-First Century by Piketty, Thomas
This one I also enjoyed; I don’t think you really need to read it first before Ideology, but I opted to do so. Reading this really inspired a love and interest of economics, and Piketty seems to do an amazing job of exploring these topics in an approachable way.
Affluence Without Abundance: The Disappearing World of the Bushmen by Suzman, James
This book wasn’t bad; it’s an exploration of life with a marginalised tribe referred to as the Bushmen. It doesn’t totally take the expected view that the simple life is better; but it does discuss how politics and the community encroaches on this tribe, and how they live life.
A Woman in the Polar Night by Ritter, Christiane
I think this is a classic book; it’s a little strange, but it does show one persons journey into the Arctic and how she learned to love it. It didn’t exactly inspire me to go and life there, but I do admire her approach!
Touching the Void: The True Story of One Man’s Miraculous Survival by Simpson, Joe
This is amazing. I read this assuming a particular fact about the story (I won’t spoil it by telling you), but it turned out that my mind was blown by what actually happened. I’ll probably read it again!
Into Thin Air: A Personal Account of the Mount Everest Disaster by Krakauer, Jon
I bought this I think after the one above; desperate for more books about climbing. This is also an amazing story; I think if anything it made me feel certain that I’ll never attempt to climb Everest.
The Case of the Honjin Murder by Yokomizo, Seishi
I just happened across this one in the bookshop and thought I’d give it a go. I can’t say it was the best; it was quite sexist. The story was probably pretty good, if you could ignore that; but I couldn’t.
Tall Man: The Death of Doomadgee by Hooper, Chloe
This was a good read but super aggravating. It’s really unsettling to learn how terrible some of the policing is; and the subsequent investigations that yielded no useful outcome. Eye-opening for me in terms of how bad racism is in Australia.
Mountains of the Mind: A History of a Fascination by Macfarlane, Robert
Pretty good. I went through a phase of reading about mountain climbing. This was a nice little overview of how people justify climbing. Good for an introduction to other things to read.
The City We Became (Great Cities, #1) by Jemisin, N.K.
For how much I loved her other books; I have to say I found this one a bit disappointing. I think by normal sci-fi standards, it’s certainly excellent, and I’ll definitely read the rest of the series; but if you’re looking for something as amazing as her other books, you might not find it here.
Annapurna: A Woman’s Place by Blum, Arlene
I really enjoyed this one. It was interesting to compare this to other climbing books written by men, which almost never feature much uncertainty or collaborative leadership.
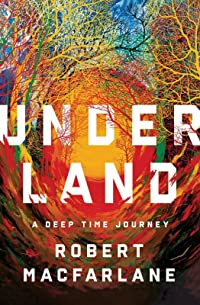
Underland: A Deep Time Journey by Macfarlane, Robert
This is just super cool. We are taken on a journey through lots of different underground worlds. Certainly makes you want to do this kind of exploring.
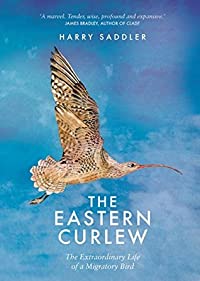
The Eastern Curlew by Saddler, Harry
I read this after meeting the author at a party! I felt so cool; I’d never met an author in real life before. Inspired by that meeting, I picked it up. It’s really a nice story about following the migratory path of a bird, and thinking about how their ecosystem is being impacted. Would definitely recommend!
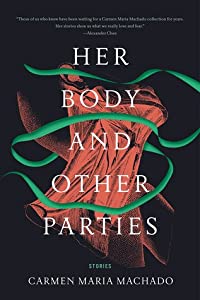
Her Body and Other Parties by Machado, Carmen Maria
Not bad. Probably not my favourite style of book, but if you like weird kind of magical fiction with a message, probably quite good.
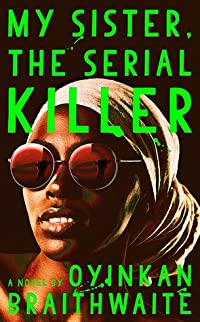
My Sister, the Serial Killer by Braithwaite, Oyinkan
I quite enjoyed this one; it was a very quick read; so I’m looking forward to more by this author!

In Praise of Shadows by Tanizaki, Jun’ichirō
Pretty good. Very very short; but a thoughtful analysis of how light impacts space. I think it’s a classic of the architecture world.
Barbarian Days: A Surfing Life by Finnegan, William
I really really enjoyed this one. Very nicely written, you feel like you’re living the life alongside the author. It’s nice to read about someone who follows their passion so directly.
Why I’m No Longer Talking to White People About Race by Eddo-Lodge, Reni
I picked this up as soon as I arrived in the UK, to gain an understanding for how people here think about race issues. Pretty good reading.

Kon-Tiki by Heyerdahl, Thor
This was a funny one. A classic kind of adventure story, from real life, I have to say I enjoyed it.
Mad, Bad & Dangerous to Know: The Autobiography by Fiennes, Ranulph
I found this one also kind of funny. I suppose this guy is very famous in the UK, but I’d not heard of him really. It’s funny to read about how he thinks of endurance, and his claim that “anyone” can be like him; in terms of running 7 marathons at the age of 70 across 7 countries; or something along those lines. Didn’t exactly encourage me to do the same, but did give me some food for thought about willpower and energy.
See What You Made Me Do: Power, Control and Domestic Violence by Hill, Jess
This is a very hard book to read, emotionally. It contains some exceptionally difficult stories. Definitely recommended reading, but if you want a more academic treatment see the earlier book by Kate Manne.
Becoming Bodhisattvas by Chödrön, Pema
Easily the best book I read last year. Of course it’s a buddhist view on how to live life; but I found it very practical and thoughtful. I’ve read it again during some difficult times, and found it very uplifting.
So, I’m very excited to share that we’re moving overseas! We’re headed to Cambridge in the UK at the end of this month.
I’m very lucky to be starting work with a very cool quantum computing company: Riverlane.
It’s going to be interesting leaving Melbourne. I’ve lived here all my life basically, and I’ve found a really nice group of friends. I’m going to miss everyone.
I owe a big thanks to everyone that’s helped me in my career and life over the years here. I won’t list all of you, but thanks :) I wouldn’t be where I am if I hadn’t had your help and support. ❤️ 💖
In particular the meetup community has been a great place for me and somewhere I was able to forge some really strong friendships. Specifically, I’ve had a great time at the Melbourne Maths and Science Meetup, the Haskell Meetup, back in the day I loved MXUG, and of course I have to thank my friend David Kemp for being the only consistent attendee of the Quantum Lunch, started way back in the day! I’ll also miss hanging out with the cool people who’ve come to events I’ve helped organise, such as compose conference and post-prediction conference. I love Melbourne for the really nice connection you get between different communities, and it’s been some of my favourite times meeting people from outside my standard little bubble.
I also have to thank my friend Charles Hill from Melbourne University, who taught me so much about quantum computing, is an amazing researcher and very kind and generous person.
Thanks also to the other people in the tech community here that have supported me and helped me first move into new jobs and learn interesting and fun things. I’ve been very lucky.
Of course, thanks again to all the people that helped out with Braneshop whom I’ve already mentioned over there.
We’re totally new to Cambridge, so if you’ve got suggestions/connections I’d love to hear about it! Definitely keen to meet some people and get into the community over there.
Reach out if you like!
I’ve benefited a lot from emailing random people and just asking questions, so please feel free to reach out to me if you think I can help with anything!
]]>Inspired by this recent paper - Towards decolonising computational sciences - I thought it might be a nice idea to write down a list of privileges that I can identify I have. I’ll probably update this list as I think of them.
My list:
These things have helped me get jobs in the past. Some of them are traits that you can improve, as well as baseline things thare are out of my control to some degree (i.e. mental health; certainly it can be improved, but certainly it’s not all my doing.)
I also found this: Privilege Checklist from this Social Justice Training program, that is a very good starting point for building a comprehensive list. This feels like a great exercise for teams to get together and think about.
What’s your list?
]]>I can’t believe I forgot to do this at the start of the year!
Let’s look back over 2018’s ideas:
relu look like? 2. what about the graph of relu . tanh ? and so on, indefinitely and arbitrarily. some features: - what points should be push through? maybe could add certain kinds of initialisations and ranges - add things like drop-out and whatnot.
lunch: - sandwhich: - bread - butter - lettuce - cucumber - butter - bread region: cbd elements are ordered by height on the plate. @sordina
So I gave my talk at the Art-and-Tech miniconf at Linux Conf AU earlier this week.
The video of my talk is here:
Other materials are here:
Thanks to Mark for having me at the miniconf!
Note that there’s a typo on the types of the somethingFun function that has
since been corrected in the slides.
Excitingly, this year I’m going to Linux Conference, and giving a talk at the Art+Tech MiniConf!
To celebrate, I redesigned the Van der Silk website:

Also, very coincidentally, PAOM re-designed their website for the new year, so it’s much easier to find all my designs: noonvandersilk on PAOM.
Hope to see you there!
]]>